

Demiryolu araçlarında hareket, her ikisi de metal olan ray ve tekerleğin etkileşimi ile meydana geldiğinden ve sürtünme ray ile tekerlek arasında yaklaşık 50mm’lik yüzey arasında olduğundan ivmelenmeleri diğer araçlara göre düşüktür. Bu yüzden demiryollarında kurallar çerçevesinde çok fazla hız azaltılması istenmez ve yollar bu husus da göz önünde bulundurularak tasarlanır ve inşa edilir.
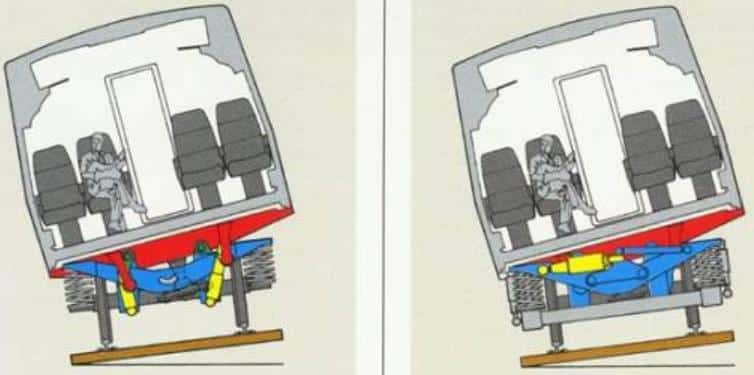
Demiryollarında hız kaybının en çok yaşandığı bölümlerden birisi de demiryollarının virajı olarak tabir edebileceğimiz kurblardır. Kurblardaki hız sorununa önlem olarak dever açıları verilir ancak bu da yeteri kadar çözüm getirmez. Yalpalı trenleri kurblardaki hız ve konfor sorununa çözüm olarak üretilen trenlerdir. Trenler kurblardan geçerken merkezkaç kuvvetinin etkisinden ötürü raydan çıkmamak için mecburi olarak hız azaltırlar. Yalpalı trenler gövde kısmından merkezkaç kuvvetinin tersi yönüne doğru hidrolik veya elektrikli aktüatörler vasıtası ile yaklaşık 8 dereceye kadar eğilerek trenin kurbu minimum hız azaltımı ile geçmesine ve aynı zamanda konforlu bir yolculuk yapılmasına da olanak sağlar.
Yalpalı trenler aktif ve pasif olmak üzere iki şekilde çalışırlar.
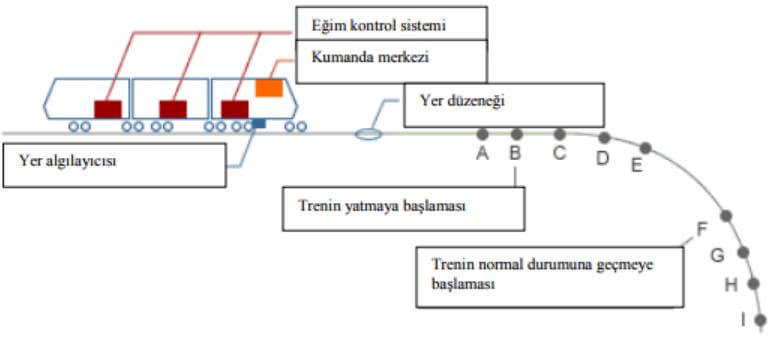
Pasif sistem: Trenin arayüzünde saklanan kurb yarıçapları, yolun eğimi gibi bilgilerden yararlanarak taban eğilme açısı, aracın yer ve hızına göre merkezkaç ivmelerinin veya bunların değişme hızlarının istenen düzeyde tutulmasını sağlar. Taşıt tabanı gövdeden hidrolik mekanizmalar ile eğilir. Bu sistem ilk olarak İspanyol Talgo trenlerinde uygulanmıştır.
Aktif sistem: Bu sistemde mikroişlemci denetleyiciler ve hidrolik esaslı hareket ettiriciler kullanılmaktadır. Merkezi işlemci, belirli bir optimizasyon çerçevesinde, seçilen az sayıda boji üzerine yerleştirilen ivme ölçer, jiroskop, çözümleyici ve hız jeneratörlerinden veri toplar ve belirli aralıklarla hız ve dengelenmiş ivmeye ilişkin verileri sağlar. Bu veriler, dengelenmesi gereken ivme değerine göre eğme açısının denetimini sağlayacak sinyallere dönüştürülür ve bu sinyaller hidrolik eğme mekanizmasına iletilir. Söz konusu sinyal üretim ve denetim sürecinde, merkezi işlemciden başka, buradan aldıkları sinyalleri işleyerek bir sonrakine aktaran birbirine seri bağlı bir dizi mikroişlemci bulunur. Bu sistem Fiat tarafından 1967 yılında geliştirilmiştir.
İlk kullanıma sunulan Yalpalı treni 1973 yapımı Japonya’nın 381 trenleridir. Tilting trenleri mevcut altyapıdaki küçük değişikliklerle birlikte 160-250km/sa hızlara ulaşabilmektedirler. Bu sistem birçok ülkede kullanımdadır.

KAYNAKLAR
[1] Tilting Train Technology-Khedkar Sudesh B .1, Kasav Sayali M.2, Jadhav Vishal S.3, Katkade Santosh D.4, Gunjal Shrikant U.5 1,2,3, U. G. Student, 4,5 Asst. Prof, Department of Mechanical Engineering, Sandip Foundation’s- SITRC, Mahiravani, Nashik (India)
[2] Tilting trains-Enhanced benefits and strategies for less motion sickness, Rickard Persson
[3] geocities.jp
[4] Prof. Dr. Zübeyde Öztürk, Dr. Veysel Arlı (2009), Demiryolu Mühendisliği
[5] Demiryolu Mühendisliği, Sakarya Üniversitesi (2014)