

Pnömatik Sistem: Pnömatik sistemler, günümüzde, kontrol ve otomasyon teknikleri için kullanılmaktadır. makine otomasyonunda ekipmanların otomatik çalışabilmesi için basınçlı hava kullanarak birbirine bağlı bileşenlerden oluşan bir sistemdir. Basınçlı hava veya basınçlı gaz genellikle işi yapan silindirleri, aktüatörleri, aletleri ve mesaneleri korumak için filtrelenir ve kurutulur. Bazı uygulamalar, kapalı basınçlı sisteme bir yağ buharı ekleyen bir yağlama cihazı gerektirir.
Pnömatik, akışkan gücünün bir uygulamasıdır; bu durumda, güç üretmek, iletmek ve kontrol etmek için basınç altında gaz halinde bir ortam kullanılması; tipik olarak, inç kare başına 60 ila 120 pound (PSI) basınçta hava gibi sıkıştırılmış gaz kullanmak. Hidrolik, yağ gibi bir sıvı ortam kullanan ancak tipik olarak 800 ila 5000 PSI aralığında olan çok daha yüksek bir basınçta kullanılan başka bir akışkan gücüdür.
Sensör: Sensör ya da algılayıcı, otomatik kontrol sistemlerinin duyu organlarına verilen addır. İnsanların çevrelerinde olup bitenleri duyu organlarıyla algılamasına benzer biçimde, makineler de sıcaklık, basınç, hız ve benzeri değerleri algılayıcıları vasıtasıyla algılarlar. Örneğin, bir sıcaklık algılayıcısı değişen ortam sıcaklığına bağlı olarak bacakları arasında elektrik potansiyel farkı (gerilim) oluşturur. Bu bilgi bir mikrodenetleyiciye aktarıldığında kapalı çevrim bir sıcaklık kontrol ünitesi elde edilir.
Hibrit Bulanık PID İle Pnömatik Bir Sistemin Kinematik Kontrolü
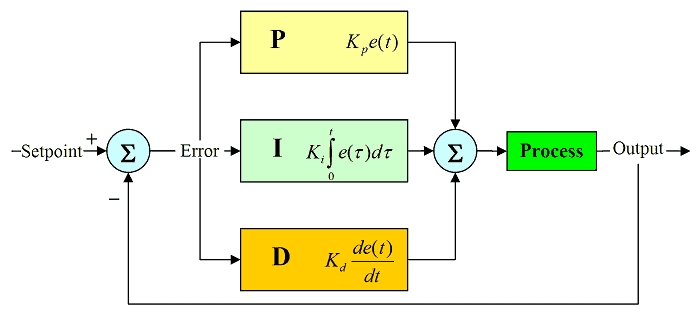
Pnömatik bir sistemde, normalde, piston sadece iki terminal uç noktasında durabilir. Sistemin yeteneklerini genişletmek için bu araştırma kinematik kontrole dayalı bir pnömatik sistem geliştirmek için yapılır. Pnömatik pistonun hem konumu hem de hızı, kontrol edilen pistonun belirlenen hız ile hedef konuma hareket edebileceği şekilde kontrol edilir. Bu makalede, çözelti olarak bulanık ve oransal-artı-integral-artı-türev (PID) kontrol algoritmasının bir melezi önerilmektedir. Kontrol algoritması iki bölüme ayrılır: bulanık kontrol ve PID kontrolü. Bulanık kontrolör, piston hedef konumdan çok uzakta olduğunda pistonu kontrol etmek için kullanılırken, PID kontrolörü, piston istenen konuma yakın olduğunda uygulanır.
Geliştirme, pistonun konum bilgisini tespit etmek için bir konum sensörü tasarlanması ile başlar. Daha sonra potansiyometre, eviren yükselteç, toplayıcı yükselteç, alçak geçiren filtre ve analogdan dijitale dönüştürücüyü içeren sensör işleme devresi tasarlanır ve gerçekleştirilir. Daha sonra, önerilen bulanık ve PID kontrol hibridi mikroişlemcide uygulanır ve programlanır.
Sistemin performansını, beş kontrol algoritmasının çökme süresini ve kararlı durum hatasını test etmek için – orantılı (P) kontrol, oransal artı-integral (PI) kontrol, oransal artı türev (PD) kontrol, PID kontrolü, ve bulanık ve PID kontrolünün hibriti araştırılmıştır. Deneylerden elde edilen sonuçlar, bulanık bulanık ve PID kontrolünün önerilen melezinin en tatmin edici çökelme süresini ve kararlı durum hatasını verdiğini göstermektedir.
Çeviri yazısıdır.